三相ブラシレスモーター[BrushLess Motor]¶
外形¶
説明¶
Info
必要オプション:Motor Palette
周波数設定
モーターモデルは非線形素子のため、以下の点に注意してメイン周波数サブ周波数を設定してください。
メイン周波数>サブ周波数
設定する値としては、おおむね10倍から20倍を推奨しています。
例えば、スイッチング周波数が10kHzであれば、
メイン周波数=100kHz
サブ周波数=10kHz
として、サブ周波数にスイッチの発信源を登録します。
三相ブラシレスモーター[BrushLess Motor]は3相のブラシレスモーターです。
このモーターは三相平衡状態だけでなく任意の状態で使用可能です。
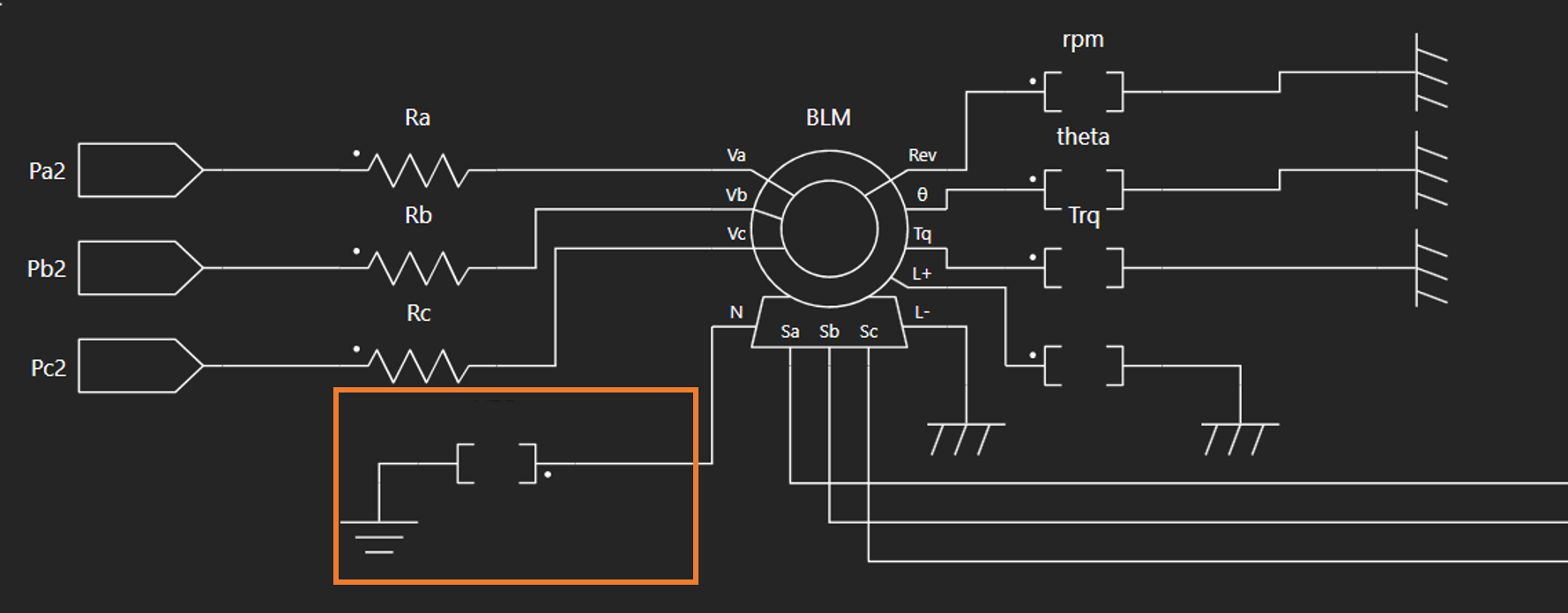
中点端子が存在しない場合は以下のように 電圧プローブ[Voltage Probe]を使用して終端してください。
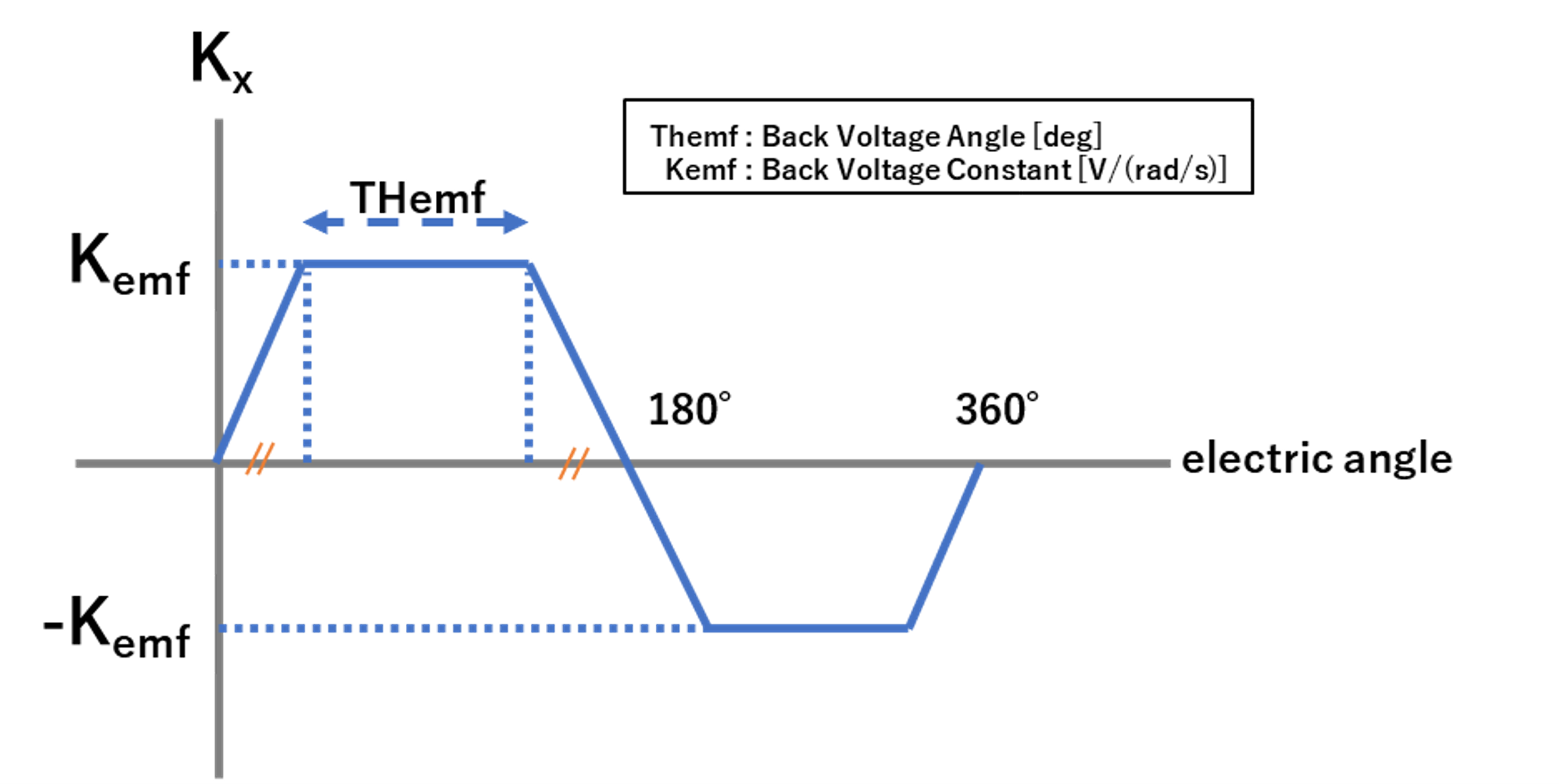
スペックの 誘導起電力定数[Back Voltage Constant]と 誘導起電力角度幅[Back Voltage Angle]はトルク特性に関係するパラメータです。
トルクTx(x=a,b,c)は回転角速度ωmとすると以下の式で計算されます。
ここでKxは対象台形特性として下図の特性を持っています。
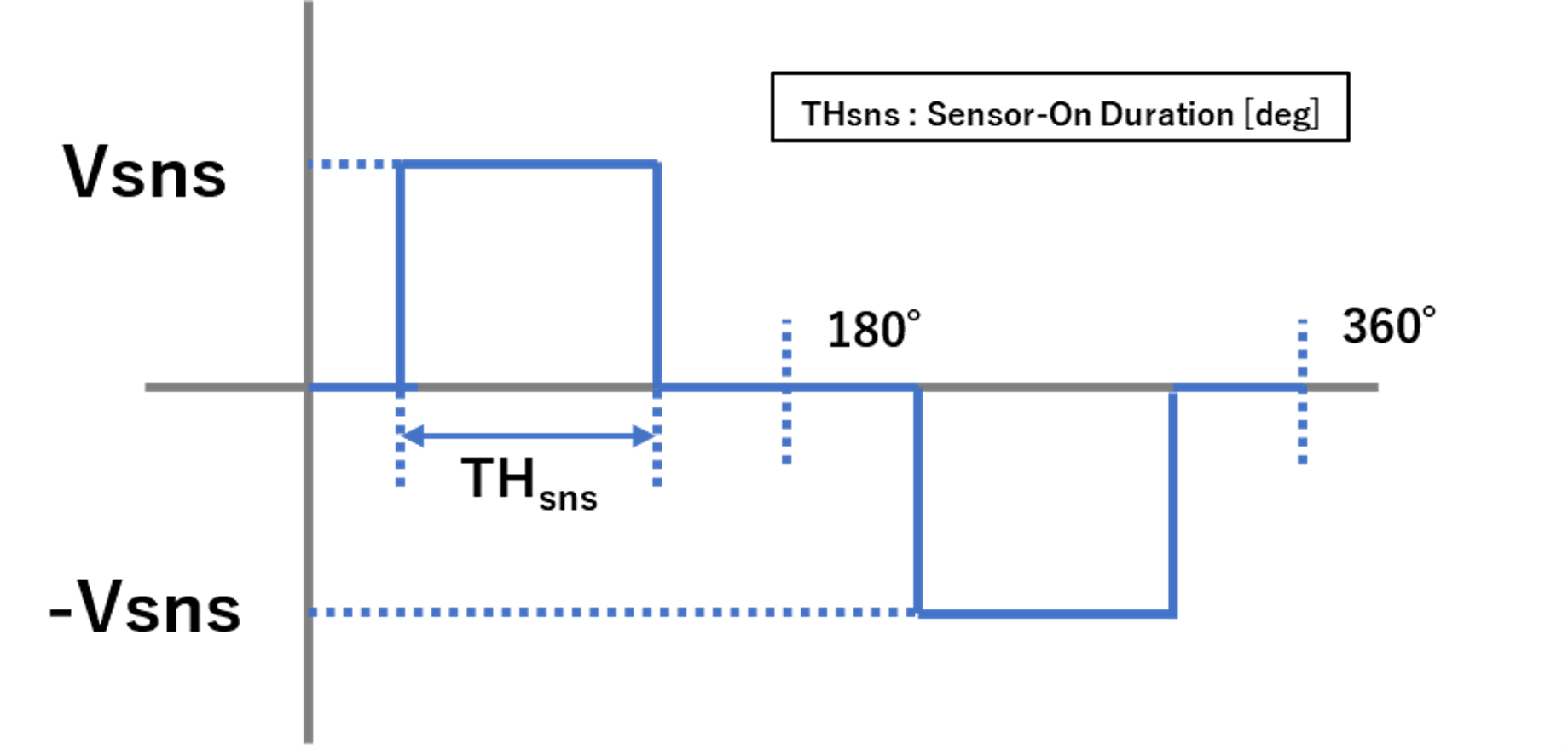
センサーオン角度幅[Sensor-On Duration]と センサー出力電圧[Sensor-On Voltage]はセンサー出力に関するパラメータであり、下図のように表されます。
センサーオン角度幅[Sensor-On Duration]は0~180°で入力します。
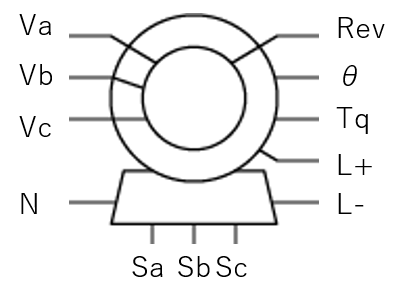
端子説明¶
| 端子 | 名称 | 説明 |
|---|---|---|
| Va,Vb,Vc | 三相入力電圧端子 | a相、b相、c相の電圧[V]を入力してください。 |
| N | 中点端子 | 中点端子です。 使用しない場合は 電圧プローブ[Voltage Probe]で終端してください。 |
| Rev | 回転速度出力端子 | rpm回転速度が電圧[V]に変換されて、この端子とモータ内部のGND端子間に出力されます。 |
| θ | 積算回転角度出力端子 | 初期値も含めた回転開始時からの積算した回転角度[rad]が電圧[V]に変化されて、この端子とモータ内部のGND端子間に出力されます。 |
| Tq | トルク出力端子 | 機械トルク[N・m]が電圧[V]に変換されて、この端子とモータ内部のGND端子間に出力されます。 |
| Sa、Sb、Sc | トルク出力端子 | 機械トルク[N・m]が電圧[V]に変換されて、この端子とモータ内部のGND端子間に出力されます。 |
| L+ | 負荷端子 | 負荷を接続するための端子です。 負荷はこの端子とモータ内部のGND端子間に接続します。 |
| L- | グランド端子 | モーター内部のグランド端子です。 インバータ側のグランドとは独立しているので、必ずしもこのグランドをインバータグランドに接続する必要はありません。 |
負荷を自由に構築する場合
負荷端子に接続する負荷を定義済みの負荷ではなく、自分で構築する場合には、以下のように置き換えて並列に接続してください。
・トルク ⇒ 電流源
・慣性モーメント ⇒ キャパシタ
・粘性定数の逆数 ⇒ 抵抗
スペック¶
| パラメーター | 内容 | パラメーター名 |
|---|---|---|
| Moment of Inertia[kg*m^2] | 慣性モーメント | IM |
| Initial Rotor Angle[deg] | 初期回転角度 | THm |
| Stator Resistance[Ω] | ステータの巻線抵抗 | Rs |
| Stator Inductance[H] | ステータの巻線インダクタンス | Ls |
| Mutual Inductance[H] | ステータ相互インダクタンス | Ms |
| Pole | 極数 | Np |
| Back Voltage Constant[V/(rad/s)] | 誘導起電力定数 | Kemf |
| Back Voltage Angle[deg] | 誘導起電力角度幅 | THemf |
| Viscosity[kgm^2/s] | 粘性定数 | VC |
| Sensor-On Duration[deg] | センサーオン角度幅 | THsns |
| Sensor-On Voltage[V] | センサー出力電圧 | Vsns |
Note
粘性定数[Viscosity]はシャフト時定数τを用いると以下の式でも求められます。
出力変数¶
| パラメーター | 内容 | Output引数 |
|---|---|---|
| - | - | - |