パルス変調器[PWM]¶
外形¶
説明¶
パルス変調器[PWM]はPWM制御を行う変調器です。
Activeのチェック外すことで素子を無効化することができます。
パルス変調器[PWM]の制御方法は以下となります。
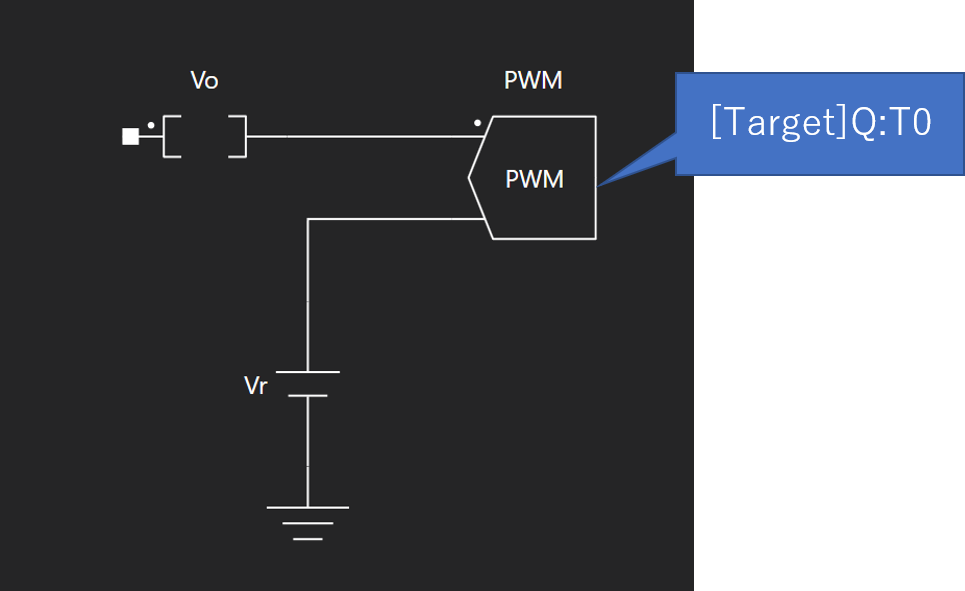
上図において、Voは主回路の出力電圧、Vrは基準電圧を表し、さらに、パルス変調器[PWM]の入力信号電圧をVi(=Vo-Vr)とし、パルス変調器[PWM]が変調する素子:Target(PWMスイッチかパルス発生器)をQとします。
Modeは時比率を設定するため、Ratioとします。
また、Qのタイムチャートが下図のように設定されているとし、図のようにオン時間をPWM制御するとします。
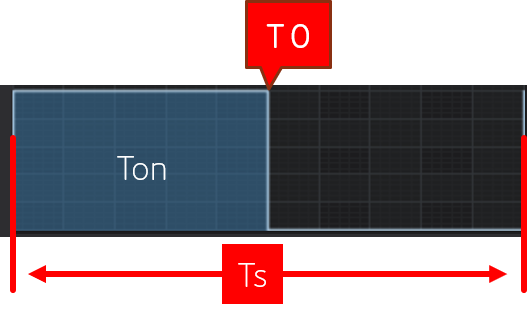
このとき、パルス変調器[PWM]はQの時比率D(=Ton/Ts)を以下の式にしたがって変調します。
D :変調時比率
Vi :入力信号電圧
Gain:変換ゲイン
Reference Duty:基準デューティ
Minimum Duty :最小デューティ
Maximum Duty:最大デューティ
すなわち、時比率DはMinimum DutyとMaximum Dutyの間では、入力信号電圧Viによって線形的に変化し、それ以外ではMinimum DutyとMaximum Dutyで制限されます。
PWM時刻制御を行うには パルス変調器[PWM]のModeをTimeにします。
この場合、Reference Duty、Minimum Duty、Maximum Dutyはすべて時比率ではなく時刻となります。
また、Gainも時刻に対応した値にする必要があります。
Tips
パルス変調器[PWM]は各周期の終わりに動作する素子です。
そのため、パルス変調器[PWM]の動作周期はメイン周波数またはサブ周波数で決定されます。
パルス変調器[PWM]では入力電圧として、周期の最終値がサンプル評価されます。
したがって パルス変調器[PWM]を使用する場合、入力電圧のリップルはなるべく小さく、
またその変動周波数は メイン周波数よりも十分小さくすることを推奨します。(十分の一以下推奨)
また制御順序については周期制御素子の実行順序を参照してください。
Tips
PWM素子は演算周期毎に結果を反映するため、デジタル制御の様に一周期遅れを含む素子となっております。
アナログ制御の様に一周期遅れを含まずPWM指令を行いたい場合は、のこぎり波発生器[Saw Tooth]とコンパレータ[Comparator]を利用することでPWM指令を与えてください。
またサンプル回路:さまざまなPMWの設定方法を参考にしてください。
スペック¶
| パラメーター | 内容 | パラメーター名 |
|---|---|---|
| Gain | 変換ゲイン | Gain |
| Reference Duty | 基準デューティ | Dref |
| Minimum Duty | 最小デューティ | Dmin |
| Maximum Duty | 最大デューティ | Dmax |
| Mode | モード(Ratio:時比率orTime:時刻が選択可能) | - |
| Active | 有効化 | - |
| Target | 変調対象素子 | - |
Example
Targetに入力できる素子はPWM Switch、Pulseの2種類です。
各素子はそれぞれ以下のように指定します。
PWM Switchの場合、シンボル名.Sw:Tn
Pulseの場合、シンボル名:Tn
※nは0から始まる整数
出力変数¶
| パラメーター | 内容 | Output引数 |
|---|---|---|
| Voltage | 入力差電圧 | シンボル名.Vi |