スイッチトリラクタンスモーター[Switched Reluctance Motor]
Location : Motor/SRM
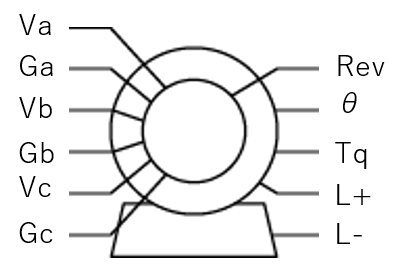
外形
説明
Info
モーターモデルは非線形素子です。
そのためメイン周波数をモーター回転速度より十分高く(100kHz程度)設定してTransient解析を用いて解析してください。
またモーターモデルを使用するにはオプション製品:MotorPaletteが必要となります。
スイッチトリラクタンスモーター[Switched Reluctance Motor]は永久磁石を使用せず、コイルによる磁界を利用して回転力を生み出すスイッチトリラクタンスモーターです。
相インダクタンス特性は台形特性であり、各相のパラメータの関係は下記図となります。
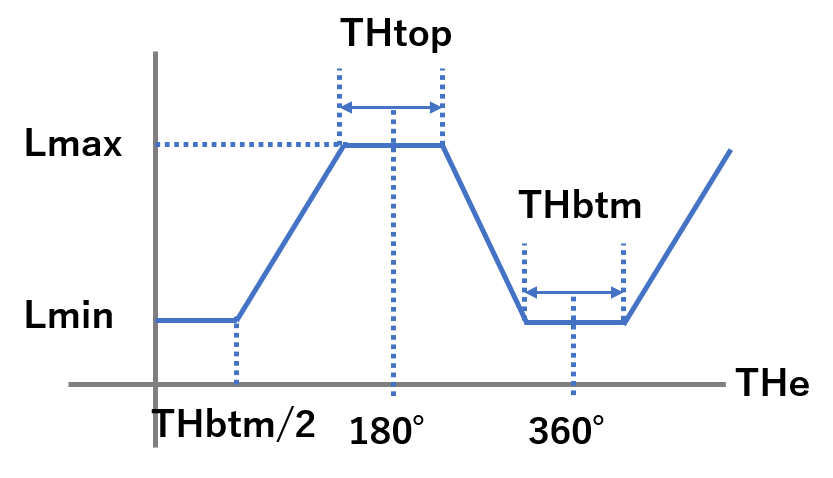
Lmin: 最小相インダクタンスLmax: 最大相インダクタンスTHbtm: 最小インダクタンス角度幅THtop: 最大インダクタンス角度幅
ただし、横軸は電気角THe、縦軸は相インダクタンスLを表しており、ロータ回転角をTHm、ロータ極数をNprとすると以下の式が成り立ちます。
相インダクタンスが増加している区間では正の回転トルク、減少している区間では負の回転トルクが得られるため、インバータで相電圧のオンオフの制御を行うことで、回転トルクの制御が可能となります。
端子説明
| 端子 | 名称 | 説明 |
|---|---|---|
| Va,Vb,Vc | 三相入力プラス電圧端子 | 後述する三相入力マイナス端子との間に各相電圧[V]を入力する端子です。 例えばa相の相電圧[V]であれば VaとGa間に入力します。 |
| Ga,Gb,Gc | 三相入力マイナス電圧端子 | 三相入力プラス電圧端子に相電圧[V]を入力するための端子です。 |
| Rev | 回転速度出力端子 | rpm回転速度が電圧[V]に変換されて、この端子とモータ内部のGND端子間に出力されます。 |
| θ | 積算回転角度出力端子 | 初期値も含めた回転開始時からの積算した回転角度[rad]が電圧[V]に変換されて、この端子とモータ内部のGND端子間に出力されます。 |
| Tq | トルク出力端子 | 機械トルク[N・m]が電圧[V]に変換されて、この端子とモータ内部のGND端子間に出力されます。 |
| L+ | 負荷端子 | 負荷を接続するための端子です。 負荷はこの端子とモータ内部のGND端子間に接続します。 |
| L- | グランド端子 | モーター内部のグランド端子です。 インバータ側のグランドとは独立しているので、必ずしもこのグランドをインバータグランドに接続する必要はありません。 |
負荷を自由に構築する場合
負荷端子に接続する負荷を定義済みの負荷ではなく、自分で構築する場合には、以下のように置き換えて並列に接続してください。
・トルク ⇒ 電流源
・慣性モーメント ⇒ キャパシタ
・粘性定数の逆数 ⇒ 抵抗
スペック
| パラメーター | 内容 | パラメーター名 |
|---|---|---|
| Moment of Inertia[kg*m^2] | 慣性モーメント | IM |
| Initial Rotor Angle[deg] | 初期回転角度 | THm |
| Stator Resistance[Ω] | ステータの巻線抵抗 | Rs |
| Minimum Inductance[H] | 最小相インダクタンス | Lmin |
| Maximum Inductance[H] | 最大相インダクタンス | Lmax |
| Stator Pole | ステータ極数 | Nps |
| Rotor Pole | ロータ極数 | Npr |
| Minimum Inductance Duration[deg] | 最小インダクタンス角度幅 | THbtm |
| Maximum Inductance Duration[deg] | 最大インダクタンス角度幅 | THtop |
出力変数
| パラメーター | 内容 | Output引数 |
|---|---|---|
| - | - | - |