直流モーター[DC Motor]
Location : Motor/DC Motor
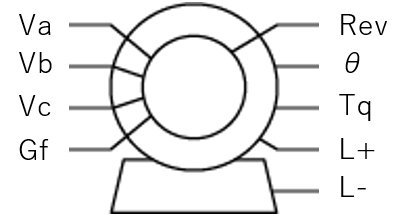
外形
説明
Info
モーターモデルは非線形素子です。
そのためメイン周波数をモーター回転速度より十分高く(100kHz程度)設定してTransient解析を用いて解析してください。
またモーターモデルを使用するにはオプション製品:MotorPaletteが必要となります。
直流モーター[DC Motor]は直流モーターです。
端子説明
| 端子 | 名称 | 説明 |
|---|---|---|
| Va | 電機子入力電圧端子 | 後述する電機子入力電圧グランド端子との間に電機子電圧[V]を入力する端子です。 |
| Ga | 電機子入力電圧グランド端子 | 電機子電圧[V]を入力するためのグランド端子です。 |
| Vf | 界磁入力電圧端子 | 後述する界磁入力電圧グランド端子との間に界磁入力電圧[V]を入力する端子です。 |
| Gf | 界磁入力電圧グランド端子 | 界磁入力電圧[V]を入力するためのグランド端子です。 |
| Rev | 回転速度出力端子 | rpm回転速度が電圧[V]に変換されて、この端子とモータ内部のGND端子間に出力されます。 |
| θ | 積算回転角度出力端子 | 初期値も含めた回転開始時からの積算した回転角度[rad]が電圧[V]に変換されて、この端子とモータ内部のGND端子間に出力されます。 |
| Tq | トルク出力端子 | 機械トルク[N・m]が電圧[V]に変換されて、この端子とモータ内部のGND端子間に出力されます。 |
| L+ | 負荷端子 | 負荷を接続するための端子です。 負荷はこの端子とモータ内部のGND端子間に接続します。 |
| L- | グランド端子 | モーター内部のグランド端子です。 |
負荷を自由に構築する場合
負荷端子に接続する負荷を定義済みの負荷ではなく、自分で構築する場合には、以下のように置き換えて並列に接続してください。
・トルク ⇒ 電流源
・慣性モーメント ⇒ キャパシタ
・粘性定数の逆数 ⇒ 抵抗
スペック
| パラメーター | 内容 | パラメーター名 |
|---|---|---|
| Moment of Inertia[kg*m^2] | 慣性モーメント | IM |
| Initial Rotor Angle[deg] | 初期回転角度 | THm |
| Armature Resistance[Ω] | 電機子抵抗 | Ra |
| Armature Inductance[H] | 電機子インダクタンス | La |
| Field Coil Resistance[Ω] | 界磁抵抗 | Rf |
| Field Coil Inductance[H] | 界磁インダクタンス | Lf |
| Mutual Inductance[H] | 相互インダクタンス | Maf |
相互インダクタンスの求め方
相互インダクタンスは以下の式から求められます。
出力変数
| パラメーター | 内容 | Output引数 |
|---|---|---|
| - | - | - |