
マトリクスコンバータ 概要編
第2回
目次
はじめに
前回は、マトリクスコンバータの基本構成と特徴について解説しました。
本記事では、マトリクスコンバータの代表的な回路方式である三相入力・三相出力構成を対象に、2種類の制御方式について、シミュレーションサンプルを用いてその動作を確認します。
▼ 第1回はこちら

今回する使用モデルについて
本記事で使用するサンプル回路は、以下からダウンロードしてご利用いただけます。
なお、本サンプル回路はScideamで動作します。
Scideamをお持ちでない方は、以下よりダウンロードをしてご利用ください。
制御方式の概要
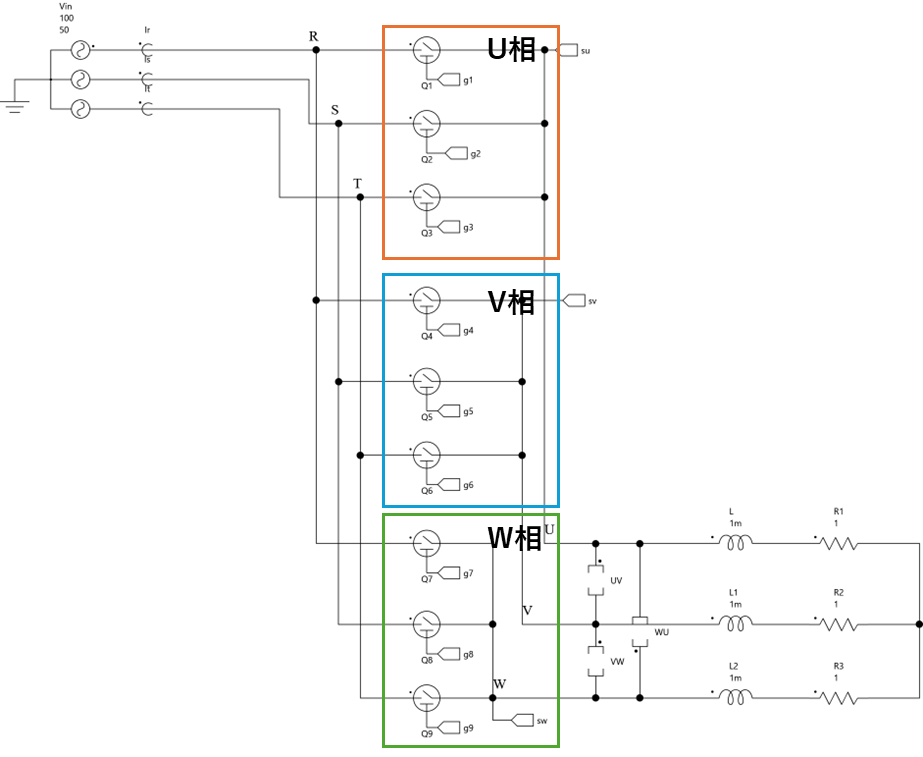
マトリクスコンバータの代表的な回路構成を以下に示します。
マトリクスコンバータの代表的な制御方式は、以下の 2 種類があります。
- AC 直接制御方式
- 仮想間接制御方式
これらの制御方式の詳細な理論については、長岡技術科学大学 伊藤先生の解説資料をご参照ください。
本記事では、各方式の概要とシミュレーション結果を中心に解説していきます。
サンプル回路構成
本サンプル回路では、同一のハードウェア構成に対して 2 種類の制御方式を切り替えて使用できます。
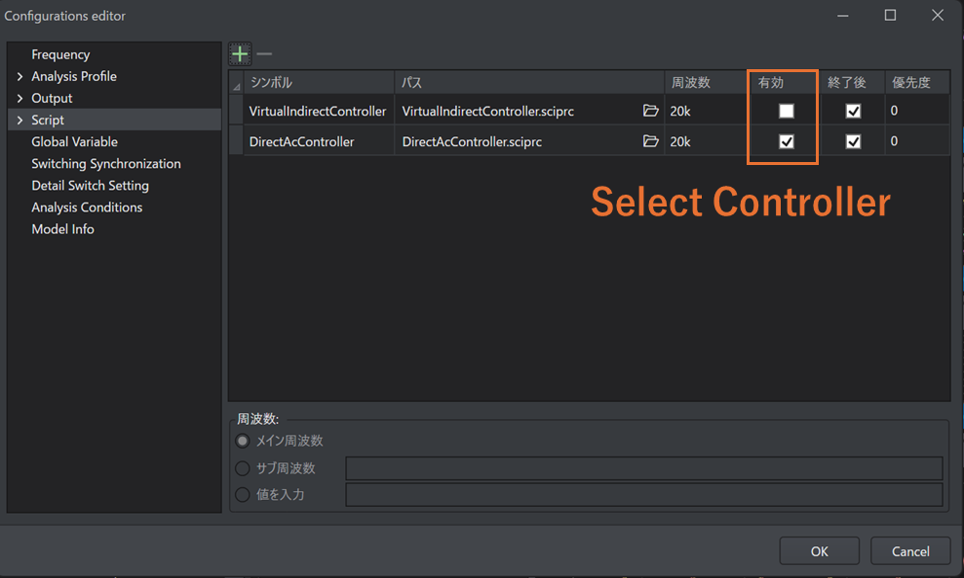
制御方式の切り替えは、Configurations Editor の Script から行います。
- DirectAcController:AC 直接制御方式
- VirtualIndirectController:仮想間接制御方式
AC 直接制御方式
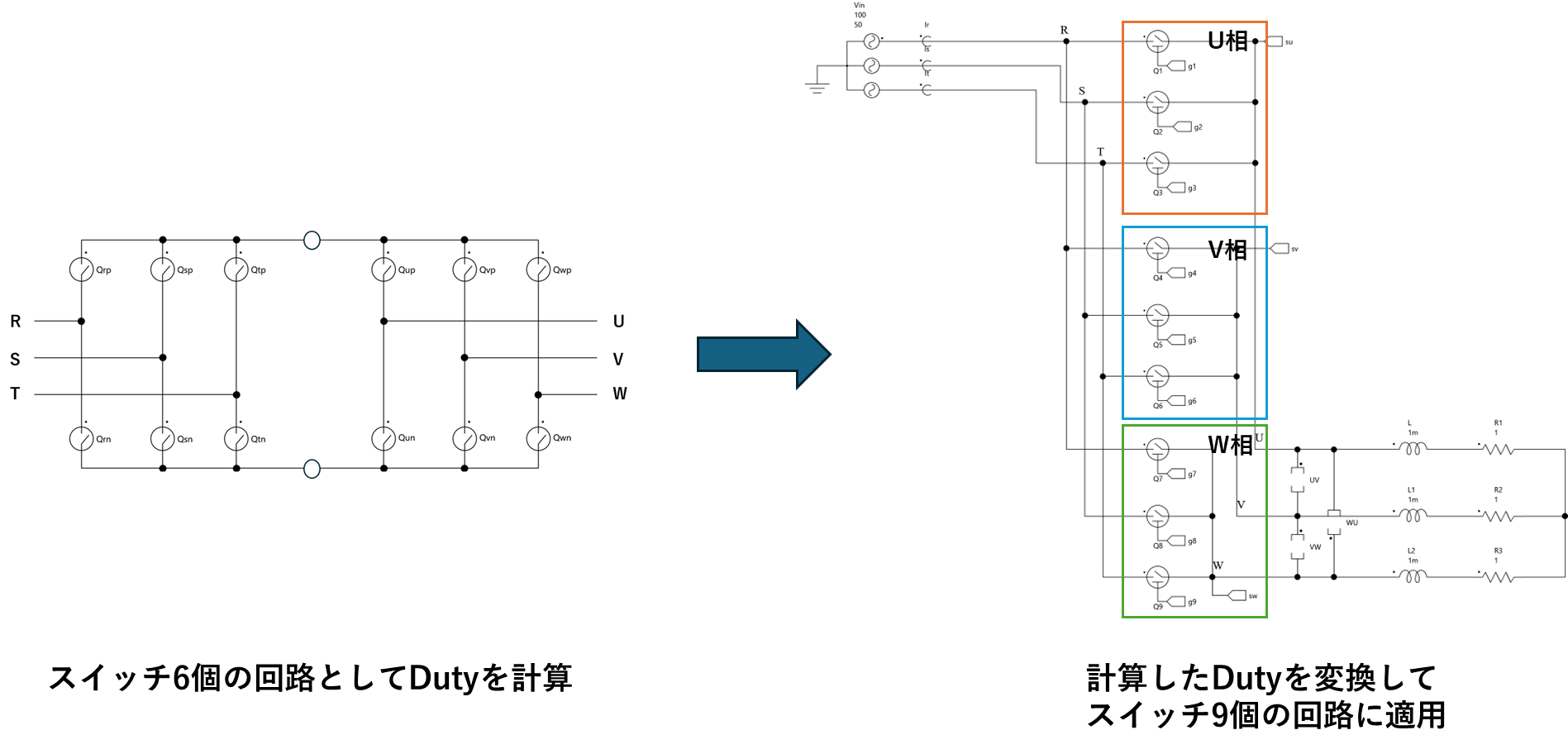
AC 直接制御方式は、交流入力から直接出力電圧を制御する方式であり、マトリクスコンバータでは9つのスイッチを同時に制御することで実現します。
セクター分け
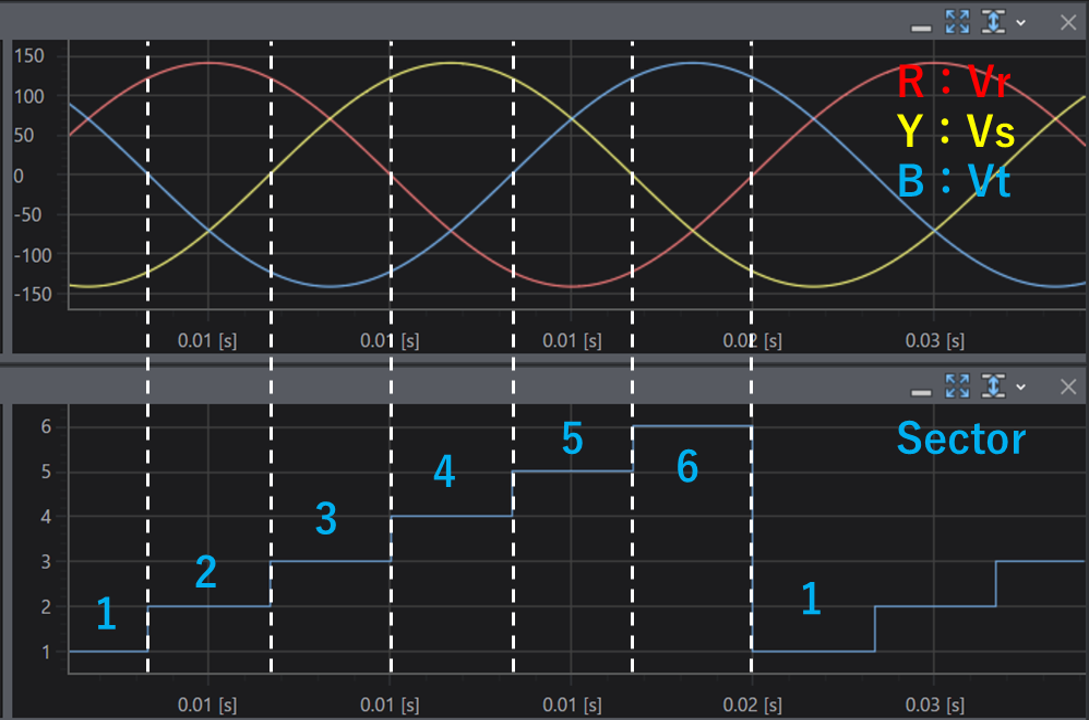
まず制御を行う前に、入力電圧の状態に応じて制御方法を切り替える必要があります。そのため、図3のように入力電圧空間を 6 つのセクターに分割し、現在のセクターの位置を判定します。
本シミュレーションでは簡単に、主回路のサイン波と同期した基準サイン波をプログラム上で生成し、現在のセクターを決定しています。
目標電圧の設定
目標電圧として、三相交流の相電圧(VuT、VvT、VwT)を設定します。
//Target
Amp = 100;
Freq = 100;
VuT = Amp * sin(2*PI*Freq*tt);
VvT = Amp * sin(2*PI*Freq*tt + 4/3*PI);
VwT = Amp * sin(2*PI*Freq*tt + 2/3*PI);
時比率の決定
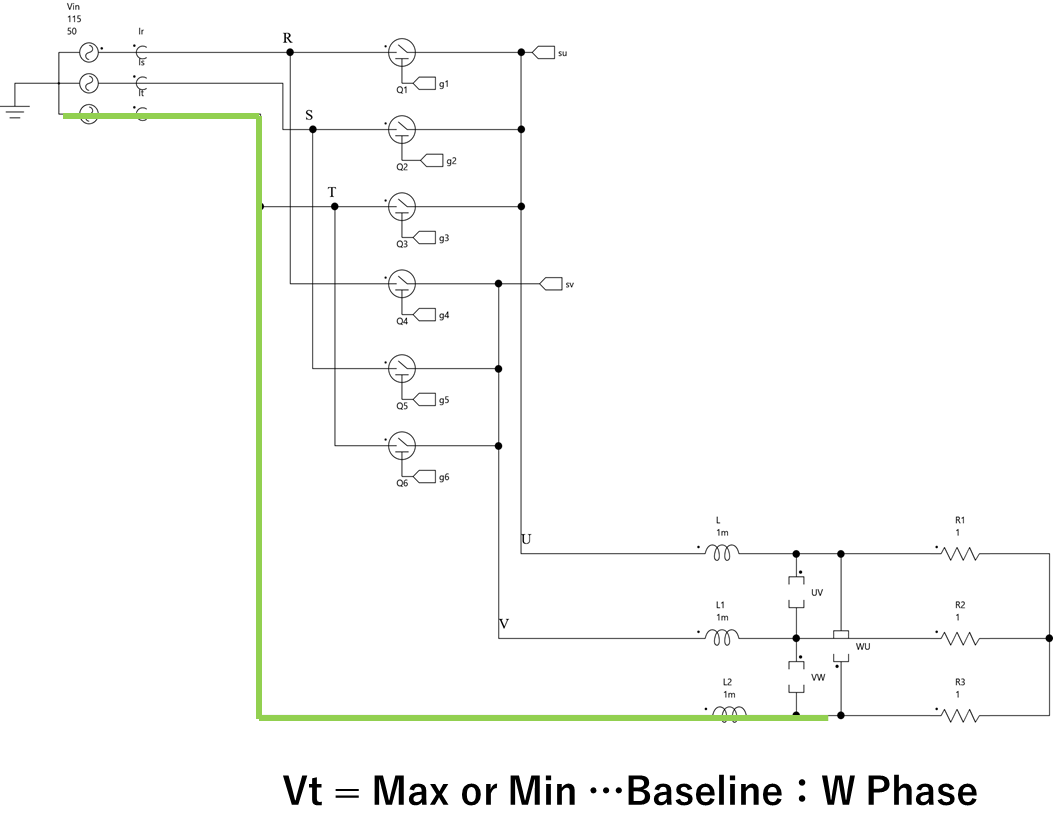
各セクター内において、入力電圧が最大または最小となる相を基準とし、残りの二相を制御することで三相分の出力電圧を生成します。(参照:参考文献)
図4は入力電圧のVtが最大または最小である区間の例となります。
この場合、W 相はVtと接続され、他の6個のスイッチを制御することで出力三相交流電圧を生成することができます。
最終的には、セクターと出力電圧の最大値、最小値の関係により、1 セクターあたり 3 通りの制御式が存在します。
つまり、全体では 6 ×3=18通りの制御式を切り替えながら動作します。
//各セクターでの処理
switch(sector){
case 1: //Area:X, Min:Vs
if(VvT>VuT && VwT>VuT){ //min=VuT
dru = 0;
dsu = 1;
dtu = 0;
drv = abs(Vr*(VvT-VuT))*Adiv;
dtv = abs(Vt*(VvT-VuT))*Adiv;
dsv = 1-drv-dtv;
dtw = abs(Vt*(VwT-VuT))*Adiv;
drw = abs(Vr*(VwT-VuT))*Adiv;
dsw = 1-drw-dtw;
}
if(VuT>VvT && VwT>VvT){ //min=VvT
dtu = abs(Vt*(VuT-VvT))*Adiv;
dru = abs(Vr*(VuT-VvT))*Adiv;
dsu = 1-dru-dtu;
drv = 0;
dsv = 1;
dtv = 0;
drw = abs(Vr*(VwT-VvT))*Adiv;
dtw = abs(Vt*(VwT-VvT))*Adiv;
dsw = 1-drw-dtw;
}
if(VuT>VwT && VvT>VwT){ //min=VwT
dtu = abs(Vt*(VuT-VwT))*Adiv;
dru = abs(Vr*(VuT-VwT))*Adiv;
dsu = 1-dru-dtu;
drv = abs(Vr*(VvT-VwT))*Adiv;
dtv = abs(Vt*(VvT-VwT))*Adiv;
dsv = 1-drv-dtv;
drw = 0;
dsw = 1;
dtw = 0;
}
break;
case 2: //Area:Y, Max:Vr
制御パルス信号の生成
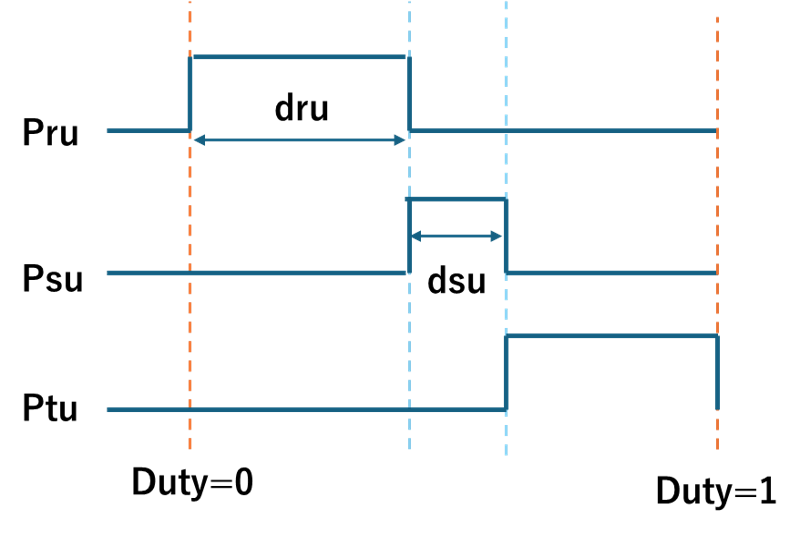
各スイッチの時比率と三角波を用いて制御パルス信号を生成します。
例えば U 相の時比率は dru + dsu + dtu = 1となるため、U 相の制御パルス信号 Pru、Psu、Ptu は下図のように設定することができます。
V 相および W 相についても同様の方法で制御パルス信号を生成しています。
dsuT0 = dru;
dsuT1 = dru + dsu;
dsvT0 = drv;
dsvT1 = drv + dsv;
dswT0 = drw;
dswT1 = drw + dsw;
setparam("Pru","T0",dru);
setparam("Psu","T0",dsuT0);
setparam("Psu","T1",dsuT1);
setparam("Ptu","T0",dsuT1);仮想間接制御方式
仮想間接制御方式では、マトリクスコンバータを仮想的に図6のように定義します。(参照:参考文献)
この仮想回路に対して、
- 入力電流制御のための仮想 Duty 計算
- 出力電圧制御のための仮想 Duty 計算
を行い、それらを合成して実際の9つのスイッチに与えるDuty を決定します。
シミュレーション結果
以下に、AC 直接制御方式および仮想間接制御方式のシミュレーション結果を示します。
[シミュレーション条件]
- 入力電圧:115 V、50 Hz
- 出力電圧:100 V、100 Hz
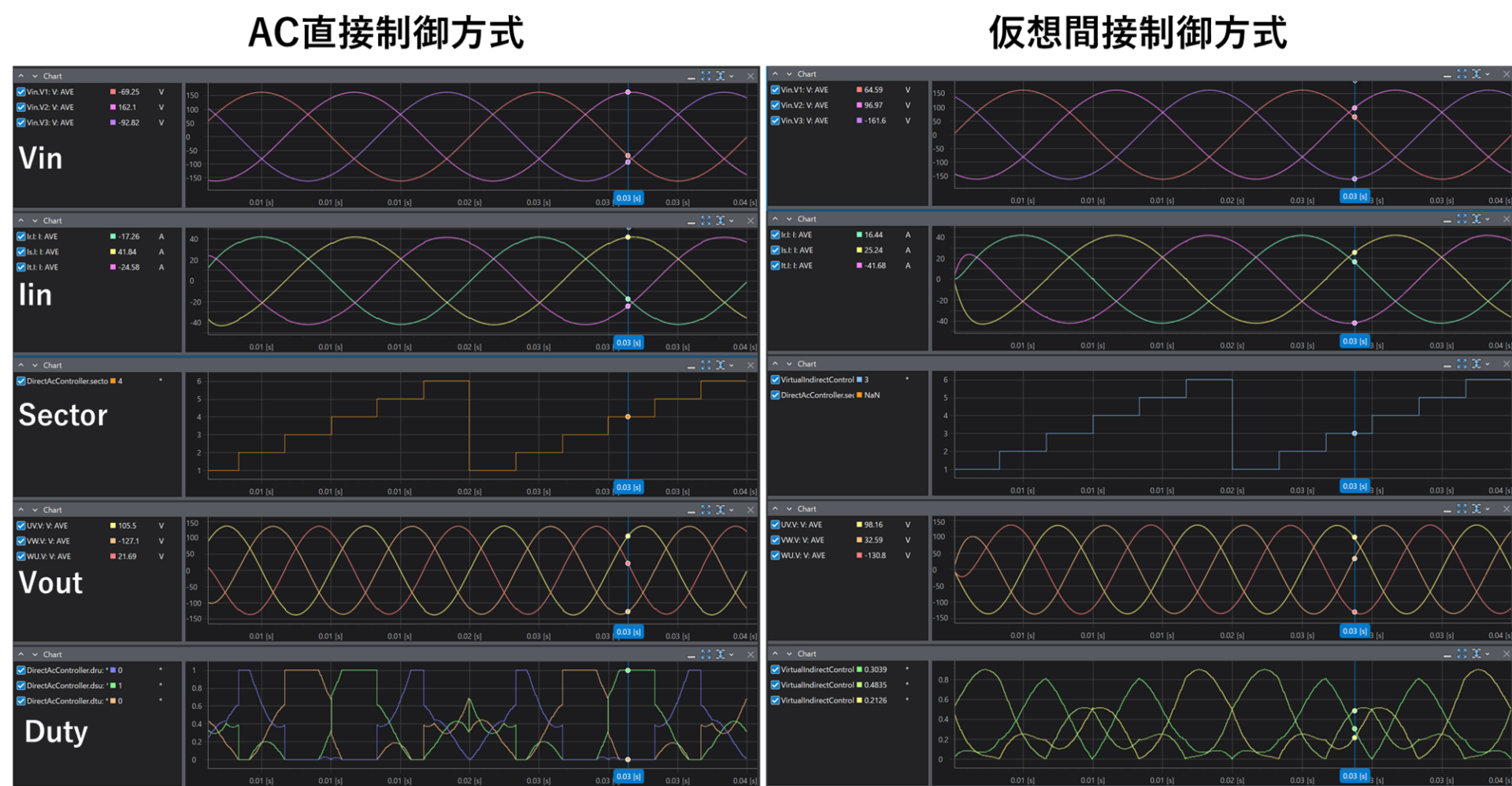
いずれの制御方式においても、出力電圧は目標通り制御されており、入力電流は力率 1 で制御されていることが確認できます。
一方で、入力電流はスイッチの1サイクルで平均化された値を表示していますが、各スイッチの Duty を詳細に確認すると、両方式で異なる挙動を示していることが分かります。
まとめ
本記事では、マトリクスコンバータにおける AC 直接制御方式と仮想間接制御方式について解説しました。
Scideam のサンプル回路では、同一のハードウェア構成に対して異なるソフトウェアを用いて制御方式の違いを比較できます。
それぞれの特性の違いを確認しながら、理解を深めていただければ幸いです。
参考文献
マトリックス・コンバータの基礎から応用まで | 日経クロステック(xTECH)
▼ 関連投稿
