1. アナログPID制御
サンプルファイル |
AnalogPidControl.cvt2 |
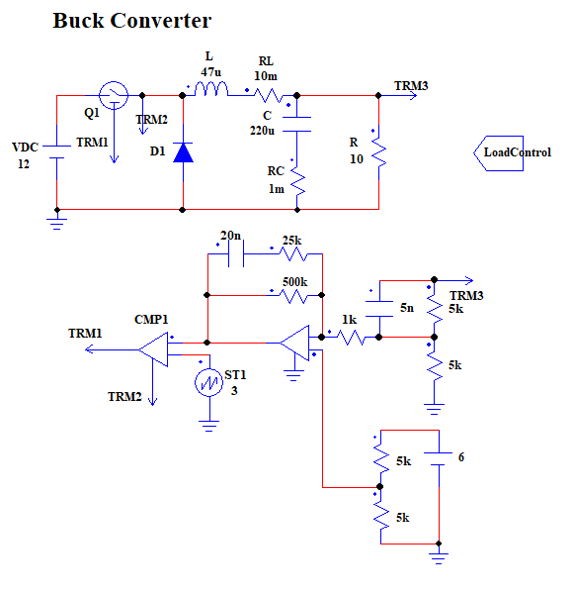
降圧型DCDCコンバータをフィードバック制御するサンプルです。
ジャンパー TRM3 の出力をフィードバックし、ジャンパー TRM1 からスイッチQ1に時比率を設定することでフィードバック制御を行います。
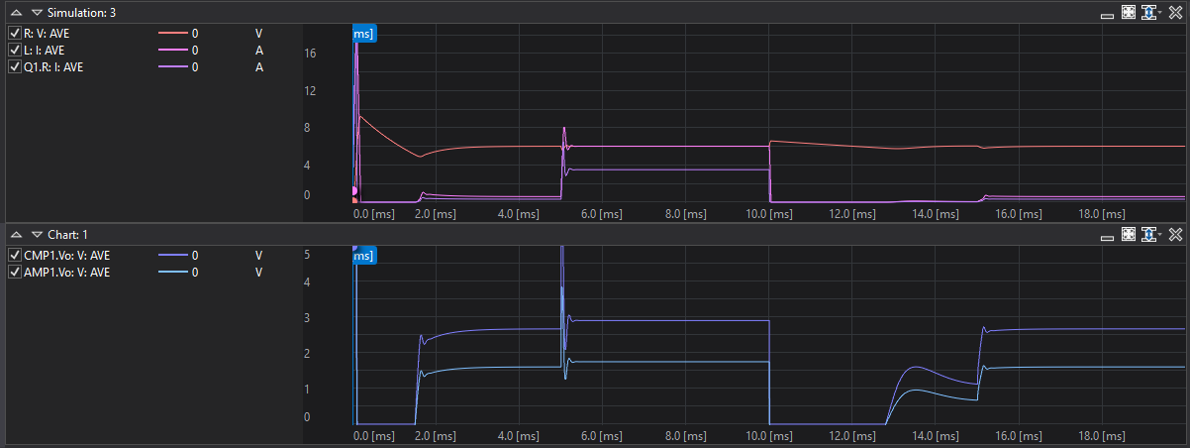
オペアンプの正の入力端子に印加しているVref=6Vが目標電圧であり、この補償器はRに印加する電圧を6Vにするように制御されます。
また、オペアンプの出力をコンパレータに入力し、三角波と比較することでPWMのパルスを生成しています。この時三角波の周波数はParameter→Frequencyで設定するメイン周波数で設定されています。
ここで、 LoadControl は負荷Rの抵抗値を時間によってステップ的に変化させるプログラムです。
LoadControl には以下のコードが記載されています。
init{
setparam("R","Value",10);
}
if(t > 5m){
setparam("R","Value",1);
}
if(t > 10m){
setparam("R","Value",100);
}
if(t > 15m){
setparam("R","Value",10);
}t はシミュレーション時間
setparam は素子などに値を設定する関数
シミュレーション開始後、5msec毎、15msecまでにRの値を変更するようなプログラムとなっています。
シミュレーションは Transient を用いて 2000サイクル 程度行ってください。